1. 机器视觉系统概述
机器视觉和计算机视觉区别:
- 计算机视觉重点在于对图像的分析,重点在于从图像中提取特征并进行处理和分析,从而得到一个结果。计算机视觉重视对理论算法的研究,目前在实际工程应用中还有一定的局限。
- 机器视觉侧重于观测目标的特征、尺寸和形态等信息,目的在于根据判断的结果做出接下来的行为。机器视觉更侧重实际应用,强调算法的实时性、高效率和高精度。
1.1. 工作流程
机器视觉系统的工作流程主要为: 光源照射—>检测对象—>相机采集图像—>采集卡传输图像—>(视觉图像分析软件进行分析处理)—>输出通信指令给硬件设备
1.2. 光学采集模块
1.2.1. 相机
1.2.1.1. 分类
- 按芯片类型:CCD/CMOS
- 按传感器结构特征:
- 面阵相机:像素矩阵拍摄,每次采集若干行的图像并以帧的方式输出;可以固定拍摄
- 线阵相机: 将图像逐行输出,高度只有1个像素。传感器只有一行感光元素,使高扫描频率和高分辨率成为可能。适合检测图像区域是条形或幅面宽、运动速度快、精度要求高的物体;需要移动产品或相机进行拍摄
- 按曝光方式:
- 全局曝光(global shutter):芯片所有行同时开始曝光,同时结束曝光
- 卷帘曝光(rolling shutter):又称逐行曝光,从第一行开始曝光,一个周期之后第二行才开始曝光,这样可以达到更高的频率。
- 按输出信号的方式:
- 模拟相机:输出模拟电压信号
- 数字相机:输出数字信号
- 按扫描方式:隔行扫描(模拟相机)/逐行扫描(数字相机)
- 相机接口分类:
- GIGE:千兆以太网接口,配合千兆以太网卡使用,可以利用网线给相机设备直流供电,适合远距离传输
- USB: 成本低廉,支持热插拔,只适合近距离传输
- Camera Link:传输速度快,支持高速传输、抗干扰性强、功耗低,但价格高昂,且需要配合。立的板卡使用。
- Firewire:IEEE 1394标准的别名,苹果公司主导开发的一种串行通信标准,传输速度快,传输距离短。
可以综合以下几点选择相机的接口:
- 传输带宽(图像尺寸*帧率,Camera Link传输速度最高)
- 传输距离(大于10米选网口)
- 即插即用(网口/USB 3.0)
- 实时性(Camera Link/Camera Link/USB 3.0)
- 成本(Camera Link需独立的板卡,成本最高)
1.2.1.2. 参数
- 分辨率:每次采集的像素个数
-
像素(像元)尺寸:单个像元的实际大小,单位一般是mm 分辨率(像元数量)和像素尺寸(像元大小)共同决定了相机芯片的尺寸: 相机芯片尺寸=相机分辨率*像素大小
注意:在电子元件成像领域,1英寸=16mm(常规换算标准1英寸=25.4mm)
- 帧率:对于面阵相机,帧率为每1s采集的帧数(frame per socond,fps),对于点阵相机,帧率为每1s采集的行数(KHz)。
-
快门速度:快门开启的有效时间长度,一般到10微秒,高速相机会更快。 高速的电子快门(曝光时间较短)需要有充足的光照才能保证图像正常的灰度;如果曝光时间过长,对于运动的物体,图像可能较为模糊。
- 像素深度:像素数据的位数,定义了灰度由暗到亮的灰阶数,如深度为8bit可展现的灰阶为2^8=256个
- 无彩色图像的像素深度为8bit
- 彩色图像(rgb图像)的像素深度为24bit,每8bit表示一种颜色(红、绿、蓝),一个像素可以表现的颜色种类有2^82^82^8约等于1667万多种。
- 图像占用空间大小: 图像占用比特数=图像分辨率*像素位深 占用字节数=比特数/8
- 传输带宽:每秒传输的数据量大小 带宽=图像尺寸(分辨率) * 位深 * 帧率 标准PAL制为25fps
1.2.2. 镜头
镜头的几个概念:
- 焦距:透镜中心到焦点的距离
- 光圈:相机镜头中可以改变中间孔大小的机械装置,因此光圈也称为相对通光孔径。 D为光圈直径,f为焦距,D/f称为镜头的相对通光孔径,一般为方便把它的倒数f/D称为光圈数,也称为F数,如果D/f=1:2,则其光圈为F2.0。
- 景深(Depth of field): 使被摄物体产生较为清晰影像的最近点至最远点的距离就是景深
焦距、光圈、拍摄距离对景深的影响:
- 光圈越大,景深越小
- 焦距越长,景深越小
- 拍摄距离越远,景深越大
- 视场(Field Of View):在光学工程中视场一般指代视场角,视场角的大小决定了光学仪器的视野范围
视场角的计算:
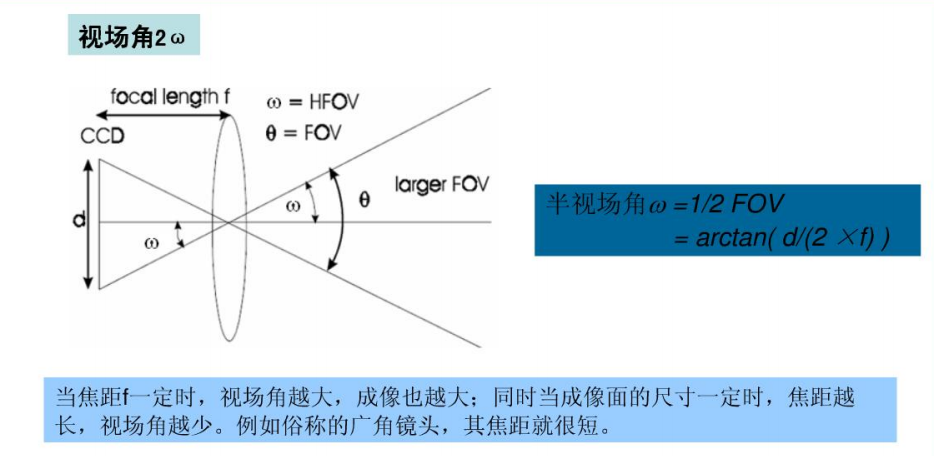
- 光学放大率:像的尺寸/实际物体的尺寸=CCD尺寸/视场大小
- 畸变:光学透镜固有的透视失真,不能消除只能改善。
- 正畸变:也叫桶形畸变,成像呈桶型膨胀状态。使用广角镜头时最容易出现。
- 负畸变:也叫枕形畸变,成像呈现向中间收缩的状态。使用长焦镜头时最容易出现。
- 线性畸变:又称线性失真,当试图近距离拍摄高大的直线结构时容易出现。
- 工业镜头分类:
| 分类 | 依据类型 |
|---|---|
| 焦距类型 | 固定焦距、可变焦距 |
| 焦距大小 | 标准、广角、望远、鱼眼 |
| 光圈 | 固定光圈式、手动光圈式、自动光圈式 |
| 镜头伸缩调整方式 | 电动伸缩镜头、手动伸缩镜头 |
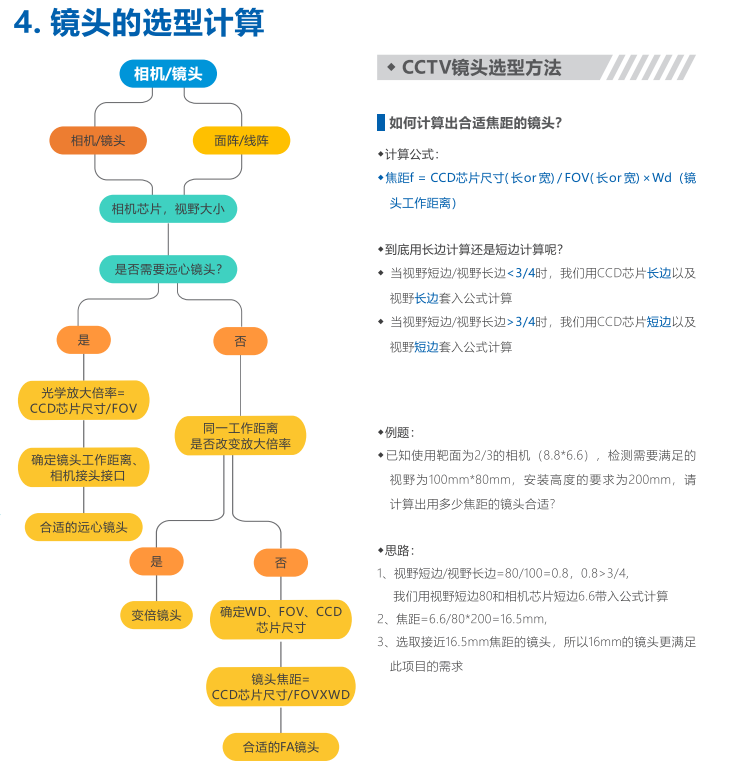
- 镜头选型
1.2.3. 光源
- 光效:光源发出的光通量和消耗功率之比,也叫发光效率,单位流明/瓦特
- 色温:照明光学中用于定义颜色的物理量,单位开尔文。
- 分类:
- 基础:分为自然光源和人工光源
- 颜色:蓝色光源、红色光源、绿色光源、红外光源、紫外光源等
- 形状:环形光源、背光源、条形光源、球积分光源等
-
光源-颜色相关知识 光谱中很大一部分电磁波谱是人眼可见的,在这个波长范围内的电磁辐射被称作可见光,范围在400nm-760nm,即从紫色380nm到红色780nm。
波长越长,穿透能力越强;波长越短,扩散能力越强
- 红外线穿透能力强,适合检测透光性差的物体,比如棕色口服液杂质检测
- 紫外线对表面的细微特征敏感,适合检测对比不够明显的地方,如食用油瓶上的文字检测
通常用相反色温的光线照射,图像可以达到最高级别的对比度。
- 如何评价光源的好坏?
- 对比度(机器视觉的照明中最重要的任务):好的光源应使特征和其周围区域有足够的灰度量区别,即突出特征。
- 鲁棒性:光源应该对不同的环境有足够好的适应性
- 亮度:如果亮度不够,就需要加大光圈,从而导致景深减小。
- 均匀性:均匀性好的光源使系统工作更加稳定
- 可维护性:主要指光源易于安装和更换,成本低。
- 光源的选型要领?
- 光源的尺寸:根据特征点面积大小选择尺寸合适的光源。
- 光源类型:根据产品特性选择合适类型的光源
- 光源颜色:根据产品的材质选择合适颜色的光源。
- 其他:根据安装空间和可能产生障碍的情况选择合适的光源。
- 光源辅助光学器件
- 反射镜:可以简单地改变、优化光源的光路和角度,为光源安装提供更大选择空间
- 分光镜:不同的镀膜参数可以任意调节反射光和折射光的比例,分光镜具体应用比如同轴光
- 棱镜:将不同颜色的复合光分开得到单一频率的光
- 偏振片:光线在非金属表面的反射属于偏振光,借助偏振片可以很有效地消除物体表面的反射光。
- 漫射片:是光照更加均匀,减少不需要的反射光
- 光纤:将光纤聚集于光纤管中,为光源的安装提供了极大的灵活性。
- 光源控制器:当光源尺寸、型号和数量确认后,需要选择合适的光源控制器,此时需要注意输出功率、通道数和光源是否匹配
1.3. 图像采集模块
通常是使用图像采集卡的形式将相机采集的图像传输给图像处理单元,图像采集卡不仅将相机采集到的模拟信号或数字信号转换成图像数据流,同时也可以控制相机的一些参数比如分辨率、曝光时间等。
1.4. 图像处理系统
主要是通过计算机及图像处理软件对图像进行多种运算并对得到的特征进行检测、定位和测量等。 常用的视觉处理软件有Vision Master/Sherlock/Halcon/Vision Pro等。
1.5. 交互界面
通过显示器等交互界面将最终的结果显示出来
应用领域
在工业中,机器视觉主要应用在以下方面:
- 缺陷检测:产品表面检测,有无破损、划痕等
- 工业测量:主要检测产品的的外观尺寸,实现无接触测量
- 视觉定位:判断目标对象的位置坐标,引导和控制机器的抓取动作
- 模式识别:识别不同的目标,如字符、二维码、颜色、形状等